




1. Caractéristiques de Base - B. Maniabilité et structure de base
Page 1 sur 1

1. Caractéristiques de Base - B. Maniabilité et structure de base
par Mr WORSEPOWER Lun 13 Mai - 14:05
Répartition des masses et Architecture
Types d'Architecture
FRPropulsion à moteur avant
FFTraction à moteur avant
MRPropulsion à moteur central
RRPropulsion à moteur arrière
4RMTransmission intégrale
À l'instar de la taille et du poids, l'architecture constitue une caractéristique de base d'un véhicule. Décrire l'architecture est assez simple : elle repose sur la partie de la voiture accueillant le moteur (avant, centrale ou arrière) et sur la désignation des roues motrices (avant ou arrière). En anglais les choses sont simples et deux lettres suffisent, la première désignant le moteur (F = forward pour avant, M = Middle pour central et R = rear pour arrière) et la seconde les roues motrices (F ou R). La langue de molière est plus complexe et l'on parle de "traction" (toujours à moteur avant) lorsque les roue avant sont motrices et de "propulsion" (à moteur avant, central ou arrière) lorsque les roues arrière sont motrices. Cette notion est importante dans la mesure où la position du moteur - l'organe le plus lourd de la voiture - et les roues motrices ont une importance considérable en matière de répartition des masses et de comportement.
Sur les voitures présentant une répartition des masse équilibrée, la puissance du moteur est transmise avec la plus grande efficacité aux roue motrices, ce qui maximise l'accélération au démarrage comme lors des reprises. Le freinage sera lui aussi plus efficace et l'avant de la voiture plongera moins lors de la sollicitation des freins.
Mais c'est en virage que l'avantage le plus important d'une bonne répartition des masses se fait sentir. Une voiture mal équilibrée est plus susceptible d'être déstabilisée par la force centrifuge et de partir en tête-à-queue.
La répartition des masses idéale suppose une distribution égal entre avant, arrière, gauche et droite. Sur une propulsion à moteur avant, une telle répartition est facile à obtenir. Elle est en revanche beaucoup plus difficile à réaliser sur une traction, ainsi que sur les voitures à transmission intégrale souvent dérivées d'une traction, car le moteur et les roue motrice se trouvent à l'avant. La situation est comparable sur une propulsion à moteur arrière. Sur la plupart des traction le moteur est disposer transversalement (c'est à dire "perpendiculairement" au sens du chassis) afin de tenter d'améliorer la répartition des masse.
Cependant, un déséquilibre dans la répartition des masses n'est pas impossible à résoudre et peut-être, en parti, amélioré par des réglages ou par le pilotage. Mais ce sont ces différences subtiles qui permettent, par exemple, à une propulsion à moteur central de l'emporter face à une propulsion à moteur avant bien équilibrée.
Sur les voitures présentant une répartition des masse équilibrée, la puissance du moteur est transmise avec la plus grande efficacité aux roue motrices, ce qui maximise l'accélération au démarrage comme lors des reprises. Le freinage sera lui aussi plus efficace et l'avant de la voiture plongera moins lors de la sollicitation des freins.
Mais c'est en virage que l'avantage le plus important d'une bonne répartition des masses se fait sentir. Une voiture mal équilibrée est plus susceptible d'être déstabilisée par la force centrifuge et de partir en tête-à-queue.
La répartition des masses idéale suppose une distribution égal entre avant, arrière, gauche et droite. Sur une propulsion à moteur avant, une telle répartition est facile à obtenir. Elle est en revanche beaucoup plus difficile à réaliser sur une traction, ainsi que sur les voitures à transmission intégrale souvent dérivées d'une traction, car le moteur et les roue motrice se trouvent à l'avant. La situation est comparable sur une propulsion à moteur arrière. Sur la plupart des traction le moteur est disposer transversalement (c'est à dire "perpendiculairement" au sens du chassis) afin de tenter d'améliorer la répartition des masse.
Cependant, un déséquilibre dans la répartition des masses n'est pas impossible à résoudre et peut-être, en parti, amélioré par des réglages ou par le pilotage. Mais ce sont ces différences subtiles qui permettent, par exemple, à une propulsion à moteur central de l'emporter face à une propulsion à moteur avant bien équilibrée.
Types d'Architecture
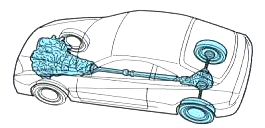
FR
Il s'agit d'une architecture classique avec moteur avant et roues arrières motrices. Cette architecture permet permet d'obtenir assez facilement une répartition des masses équilibrée. Outre l'amélioration en terme de tenue de route, la distance séparant les roues directrices des roues motrices offre un excellent comportement. En revanche, il peut s'avérer difficile d'assurer une transmission de puissance optimale sur certains revêtement.
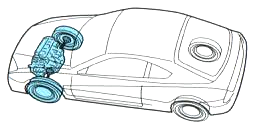
FF
Ici, le moteur, tout comme les roues motrices, est situé à l'avant. Disposer au même endroit le lourd moteur et les roues motrices permet d'offrir un habitacle plus spacieux, mais entraine par définition une pesanteur de l'avant. Par ailleurs, les roues motrices assurant également la direction, l'adhérence des pneus avant doit assurer à la fois la transmission de puissance au sol et l'angle de direction en virage. Par conséquent, cette configuration est assez mal adaptée aux moteurs à puissance très élevée.
MR
Ici, le moteur est situé au centre de la voiture et anime les roues arrières. Ce positionnement du moteur le rapproche du centre de gravité de la voiture, ce qui permet de virer plus serré. Il assure également une adhérence maximale des pneus avants et arrières à l'accélération comme au freinage. Cette architecture est fréquemment employé sur des voitures de sport et de compétition.
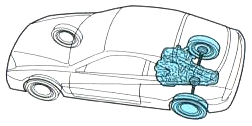
RR
Cette architecture combine un moteur placé à l'arrière, plus ou moins en porte-à-faux, et des roues arrières motrices. Elle concentre le poids sur la partie arrière de la voiture, ce qui fait reposer plus fermement les roues arrières au sol et maximise la transmission de la puissance et l'accélération. En revanche, elle réduit les masses sur les roues avants, ce qui augmente le risque de sous-virage à l'entrée en courbe. Par ailleurs, compte tenu du poids reposant sur les roues arrières, lorsque celles-ci décrochent, elles le font violemment, et la récupération nécessite un talent certain de la part du pilote.
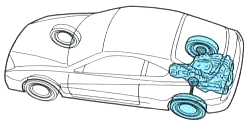
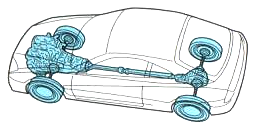
4RM
Ici, la puissance développée par le moteur est transmise aux quatre roues. Malgré le poids accru que requiert les organes de transmission supplémentaires, cette architecture est la mieux adaptée aux départs arrêtés et à l'accélération. Par contre, ce surcroit de puissance dégrade légèrement le comportement en virage. N'importe quelle architecture classique peut être transformée intégrale, mais les comportements diffèrent avec cette configuration. En règle générale, les roues avants ou arrières seront considérées comme les roues motrices "principales", le couple moteur transmis aux roues motrices "secondaires" étant accru en cas de perte d'adhérence des roues principales.
Citer de :


Mr WORSEPOWER- Admin
- Messages : 319
Date d'inscription : 13/05/2013
Age : 38
Localisation : Région Parisienne, pas Paris ! -

» 1. Caractéristiques de Base - A. Les performances dépendent des dimensions et du poids
» 3. Principes de Base du Virage - C. Domptez votre voiture
» 2. Réglages de base par sous-ensemble - B. Obtenir l'adhérence optimale
» 2. Réglages de base par sous-ensemble - C. Ajustement du comportement en virage
» 2. Réglages de base par sous-ensemble - A. Equilibrer les suspensions avants et arrières
» 3. Principes de Base du Virage - C. Domptez votre voiture
» 2. Réglages de base par sous-ensemble - B. Obtenir l'adhérence optimale
» 2. Réglages de base par sous-ensemble - C. Ajustement du comportement en virage
» 2. Réglages de base par sous-ensemble - A. Equilibrer les suspensions avants et arrières
Page 1 sur 1
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum|
|
|